As a Project Lead, I delivered an award-winning battery-swapping multi-agent robotic system.
Most robots have a problem – they run out of power. Of commercial robots surveyed, most spend about half of their time charging.
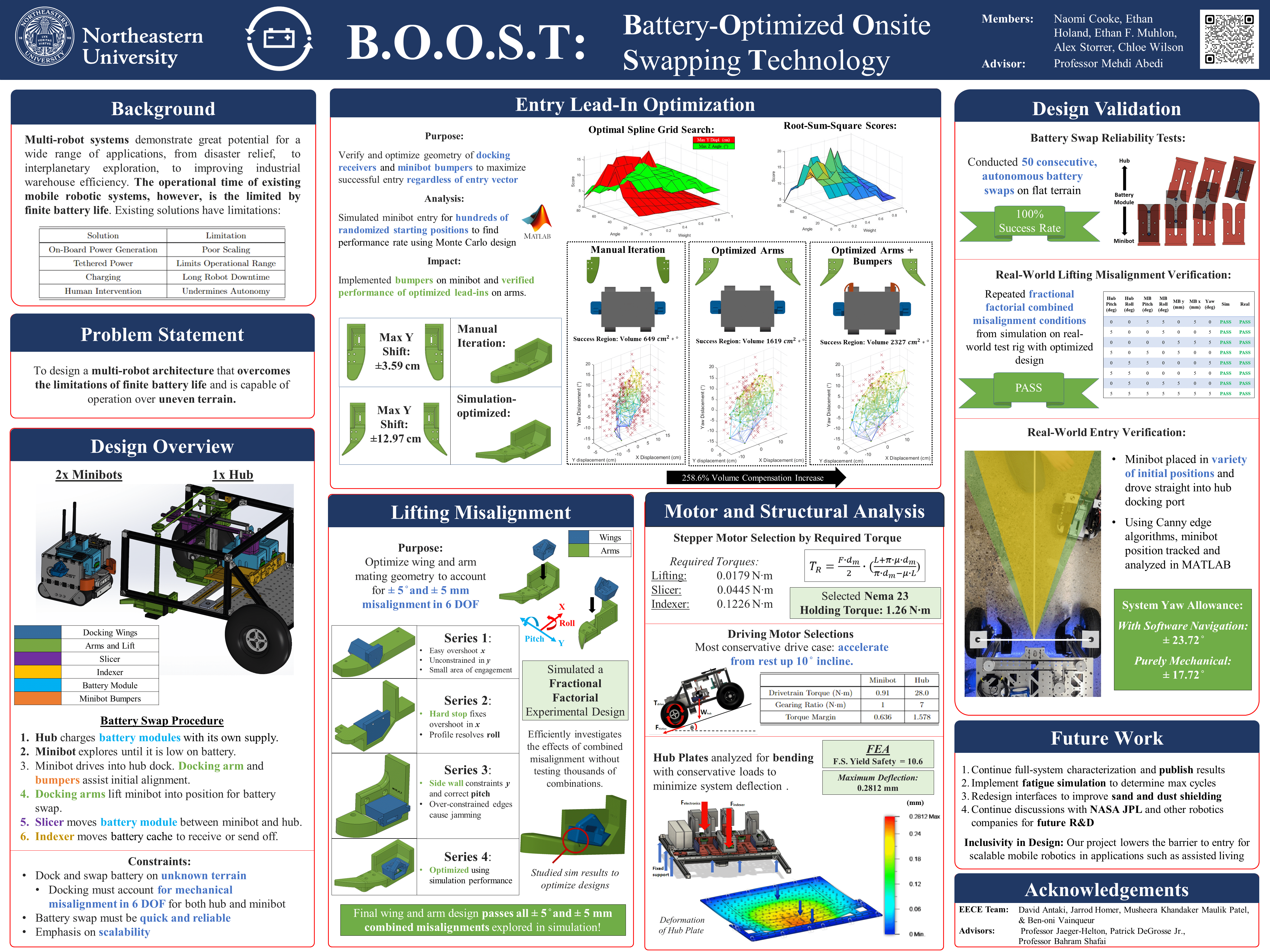
BOOST is a proof-of-concept architecture that leverages a heterogeneous multi-agent system to enable continuous operation of a fleet of minibots. While the minibots conduct their tasks, a large hub robot generates power and distributes it to an internal cache of battery modules. When minibots’ power run low, they return to the hub, autonomously docking and conducting a battery swap. The result is robot downtime measured in minutes as opposed to hours.
I shared Project Lead responsibilities with Jarrod Homer, representing the mechanical aspects of the project.
Results
In one year of development, we successfully created a proof-of-concept architecture with one hub robot, two minibots, and four battery modules. We completed full integration, achieving autonomous docking and battery swapping both indoors and outdoors.
We presented our work at the 2023 RISE Expo and the MechE and EECE Capstone Days. We were honored to be recognized for our work as a Capstone Track Winner and winner of the Gorlov Innovation Award, the top prize among about 30 teams.
Following success within our university, we sought to share our work with the wider world. Battery-swapping has potential to impact fields across robotics, from agriculture to search-and-rescue. As my graduate research focus is on space robotics, I worked to lead a publication focusing on adapting our system to power a fleet of planetary explorers. As the first author, I presented this work at the 2024 IEEE Aerospace Conference on March 7th, 2024 in Big Sky, Montana. A pre-print is available on arXiv.